The HmmngbRD-290 (<30cm) is a specialized unmanned aerial vehicle (UAV) designed for efficient and secure autonomous routing and navigation in GPS-denied environments. Constructed with a compact yet durable 290mm carbon fiber frame, this FPV drone offers exceptional agility and resilience. Its integrated OAK-D camera enables autonomous navigation, allowing for precise control and exploration of diverse terrains without reliance on GPS signals. Primarily intended for aerial videography and reconnaissance missions, the HmmngbRD-290 excels in capturing high-quality footage while ensuring operational safety and reliability.
FEATURES
Compact & Lightweight Design
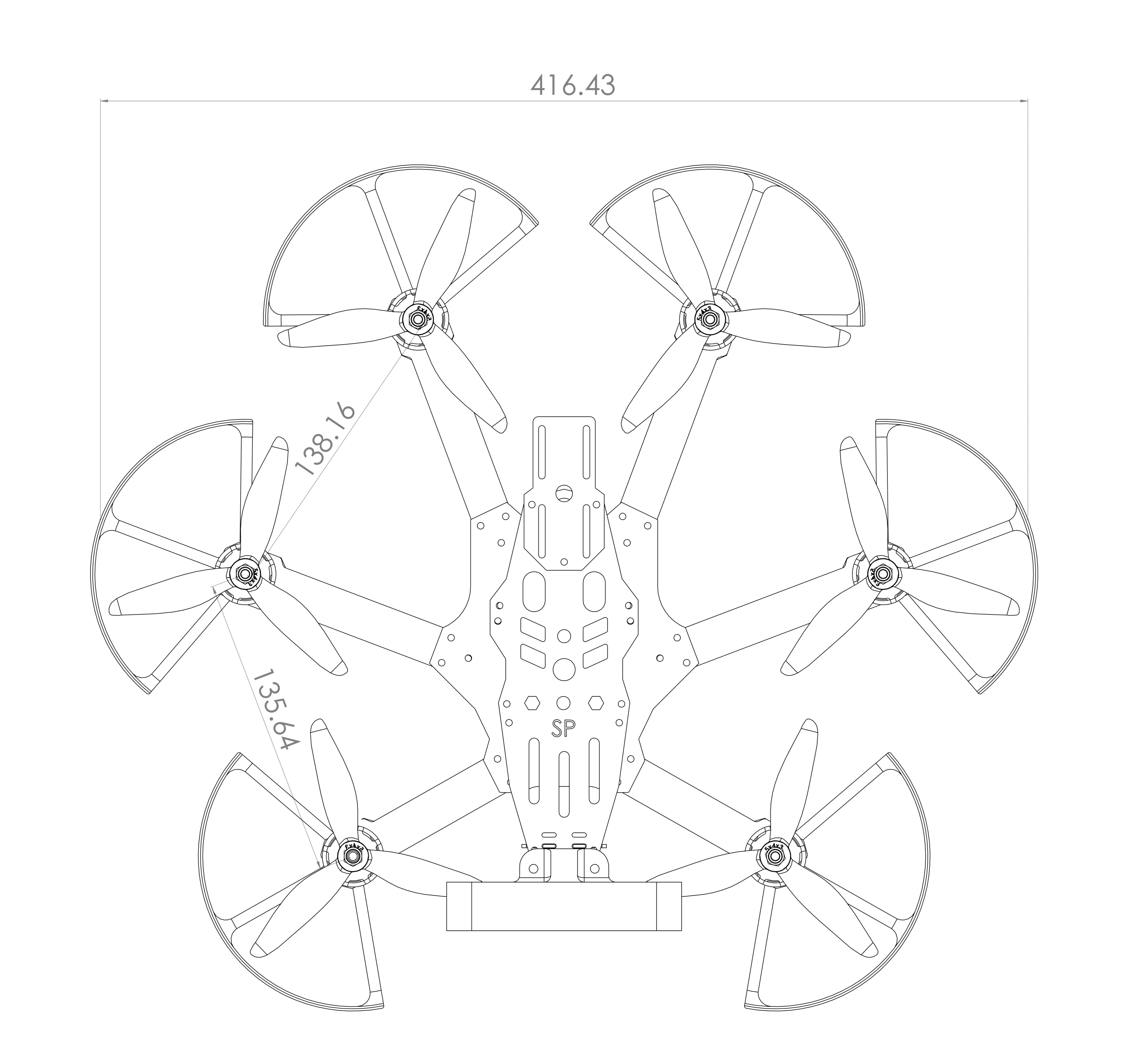
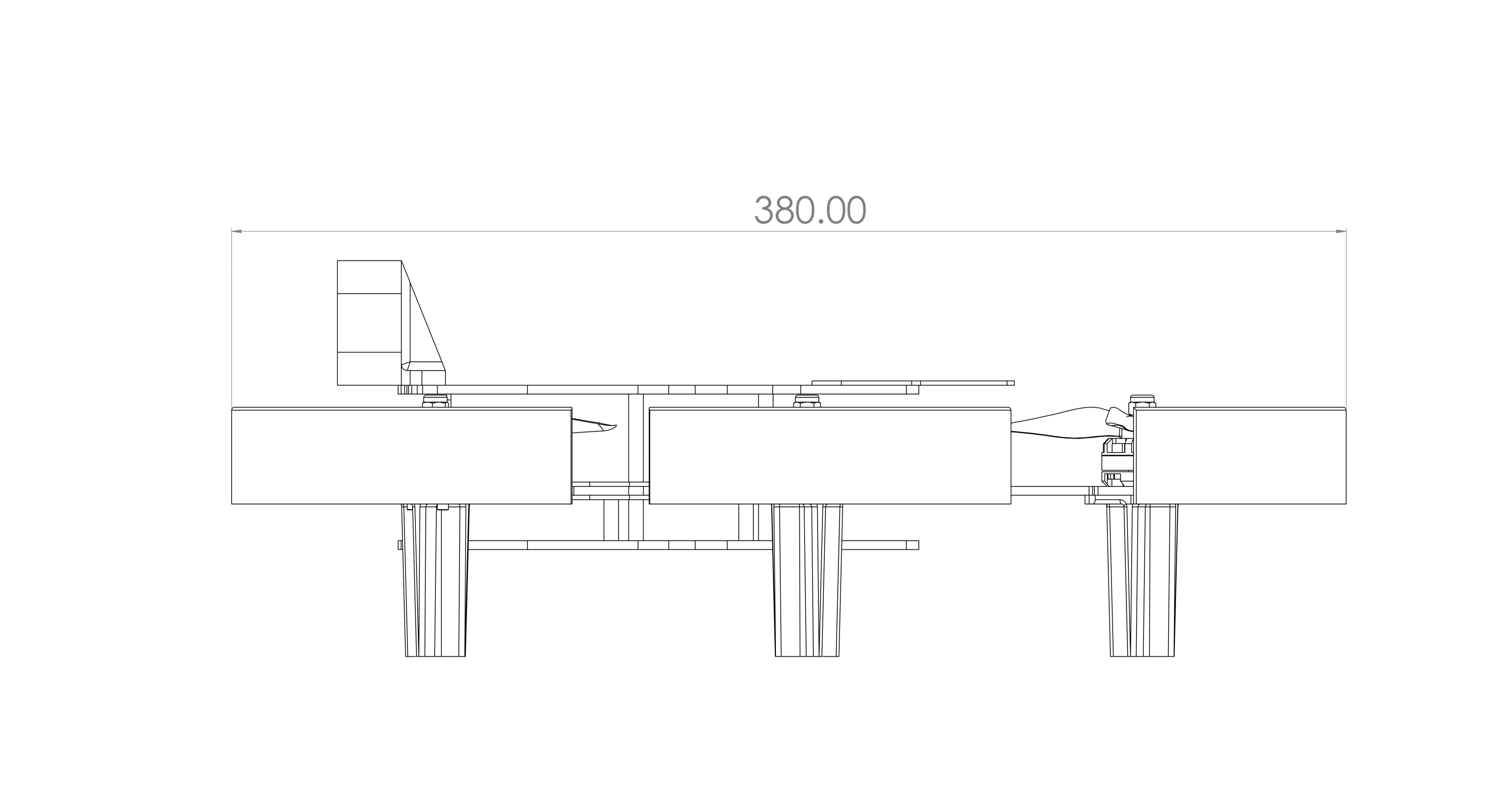
Easily maneuverable due to its 290mm carbon fiber frame.
Autonomous Navigation with OAK-D Camera
Capture pre-programmed flight paths or explore freely with the integrated OAK-D camera for obstacle avoidance.
First-Person View (FPV) Capability
Immerse yourself in the flight experience with real-time FPV goggles or a monitor.
INDUSTRIES
Professional Photography & Videography
Capture stunning aerial footage for real estate, events, and more.
Small Scale Mapping
Create detailed maps of parks, construction sites, or agricultural fields with ease.
Indoor Search and Rescue
The hmmngbRD-290's compact size and maneuverability make it ideal for navigating confined spaces to locate missing persons.
Surveillance & Security
Monitor large areas or provide aerial support for security personnel with the hmmngbRD-290's long flight time and FPV capabilities.
TECH SPECS
SPEED
Performance Parameters
SOFTWARE
Mission Planner
Mission Planner is an open-source ground control station (GCS) specifically designed for vehicles using the ArduPilot autopilot software. It provides a user-friendly interface for configuring your autopilot, planning missions, monitoring flight data, and controlling your vehicle in real-time.
ROS-Noetic
ROS Noetic, combined with MAVROS, provides a powerful toolkit for developing robotics applications, especially for UAVs. MAVROS acts as a bridge between ROS and the MAVLink communication protocol, enabling control and data exchange between ROS software and MAVLink-enabled autopilots. It offers functionalities like sending control commands, receiving real-time data, and facilitating the development of custom ROS nodes.
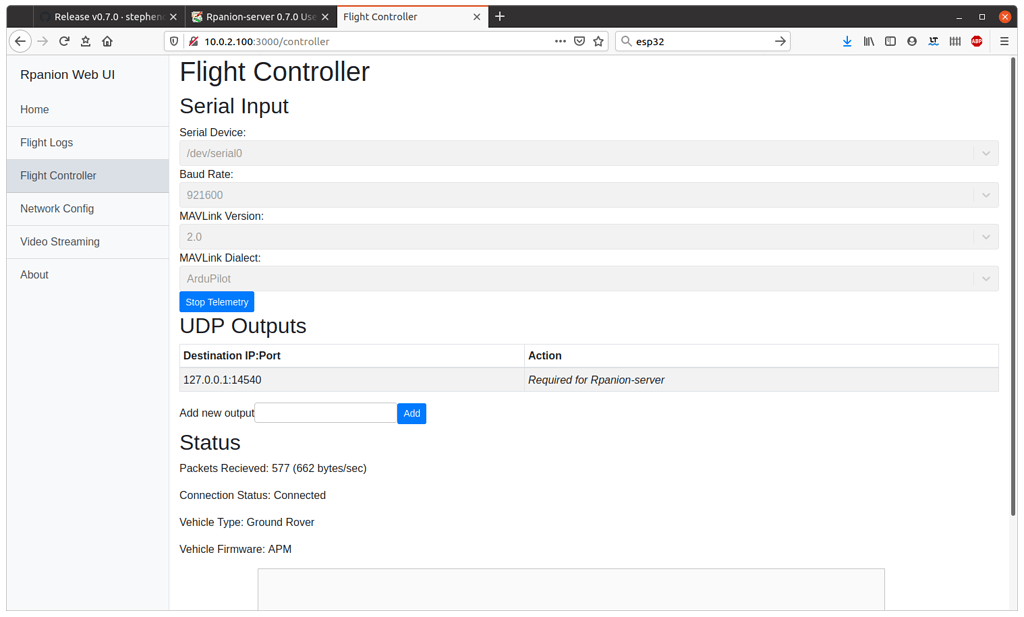
RPanion
RPanion is a software package designed to integrate companion computers, such as the Raspberry Pi, with autopilots used in unmanned aerial vehicles (UAVs). It provides a web-based interface for configuring the network, telemetry routing, and logging from a connected flight controller.
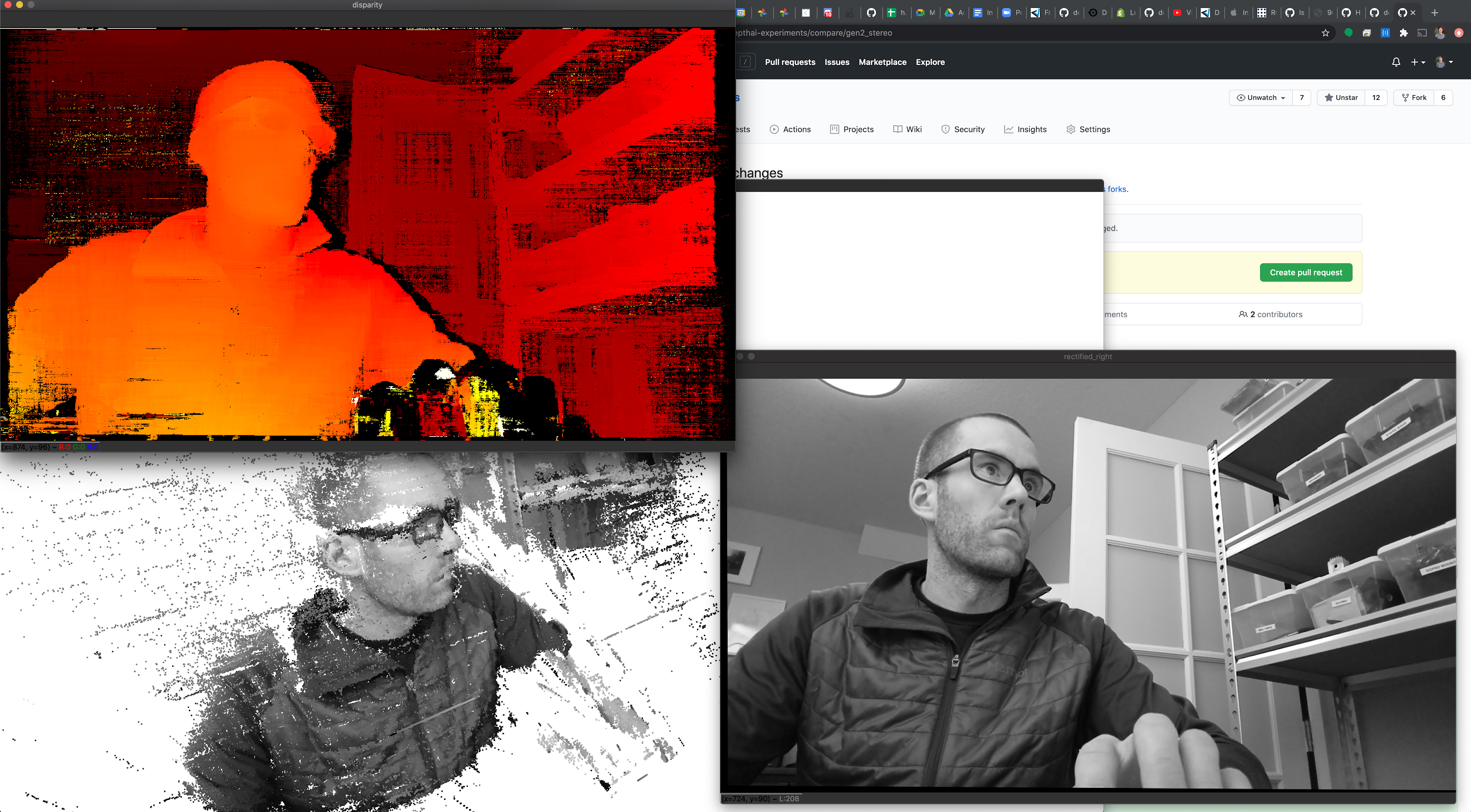
Luxonis - Depth AI
DepthAI is an open-source library from Luxonis specifically designed for developing applications on their DepthAI development kit. The DepthAI development kit is a powerful single-board computer with integrated depth cameras and AI accelerators, making it ideal for computer vision and machine learning applications.